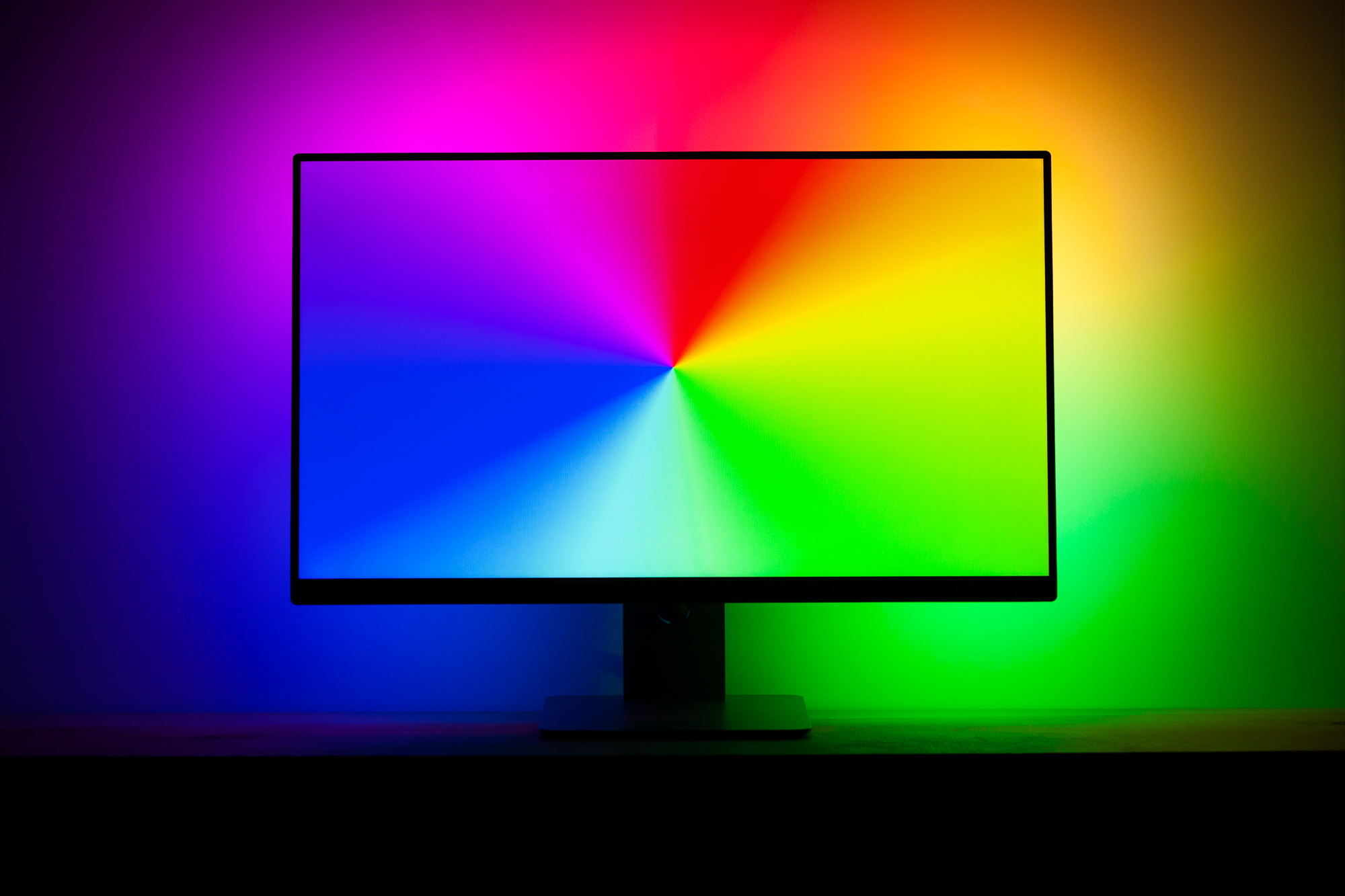
Ambilight
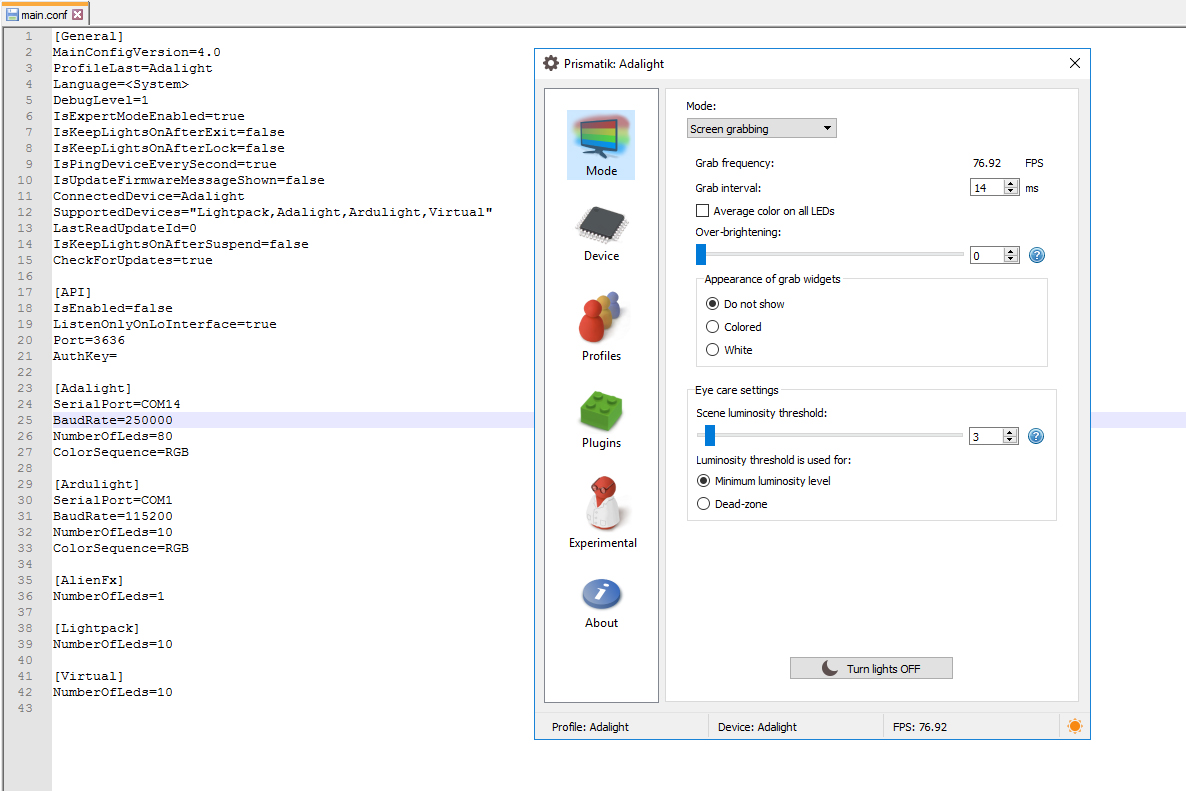
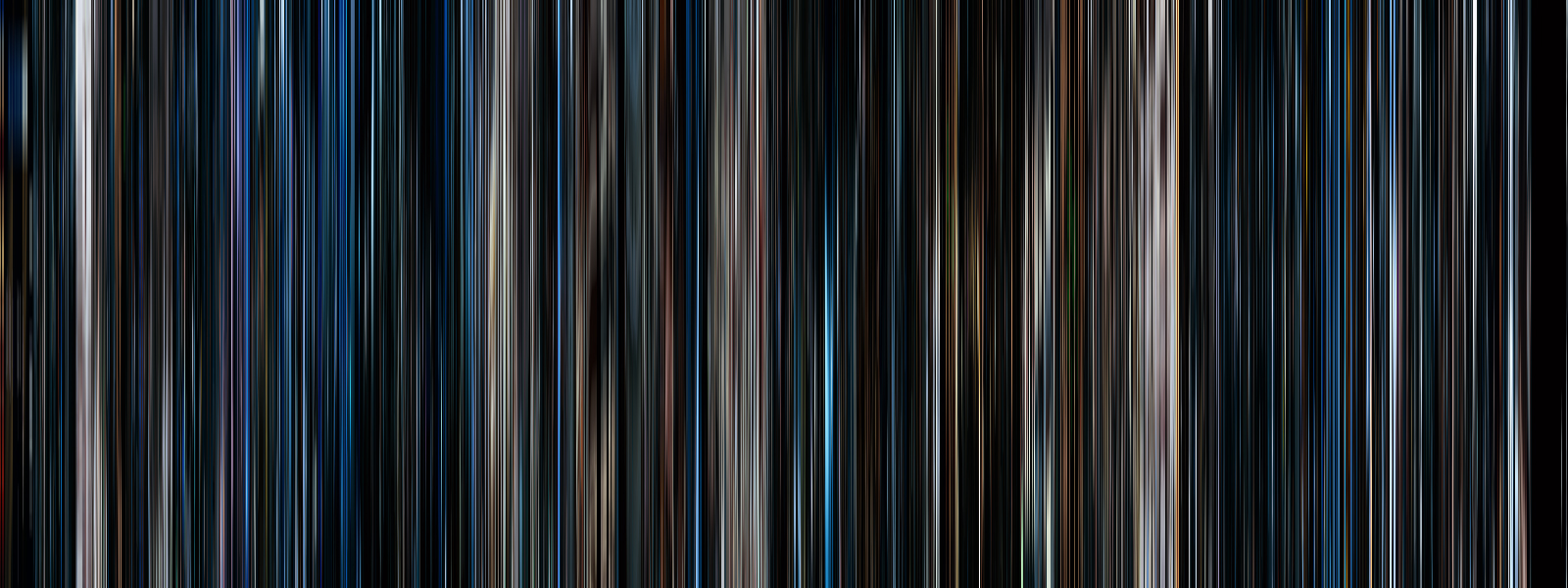
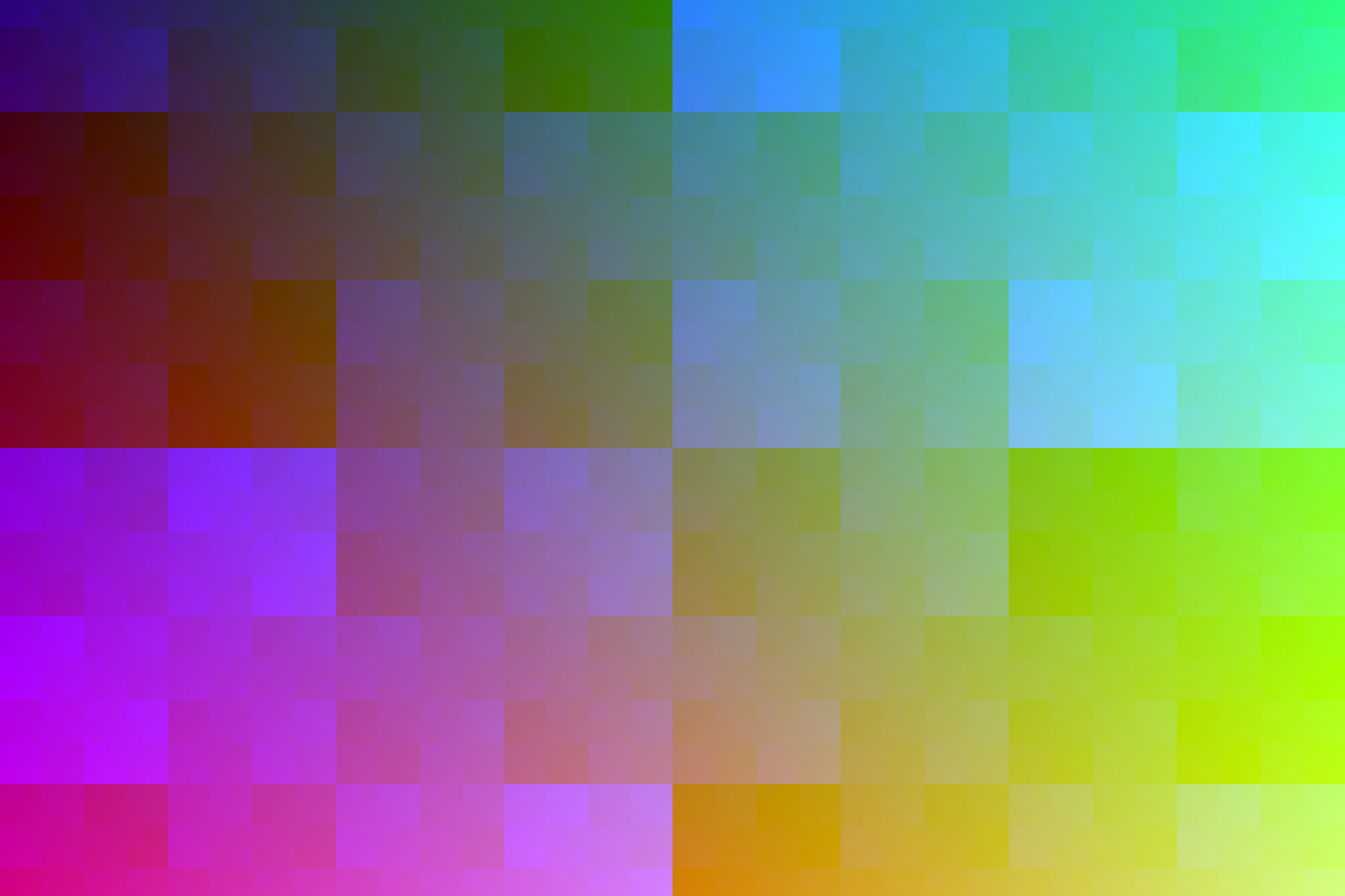
Visualizing Adalight Header Information
Enough with the in-depth boring stuff. Let’s do something fun with Adalight!
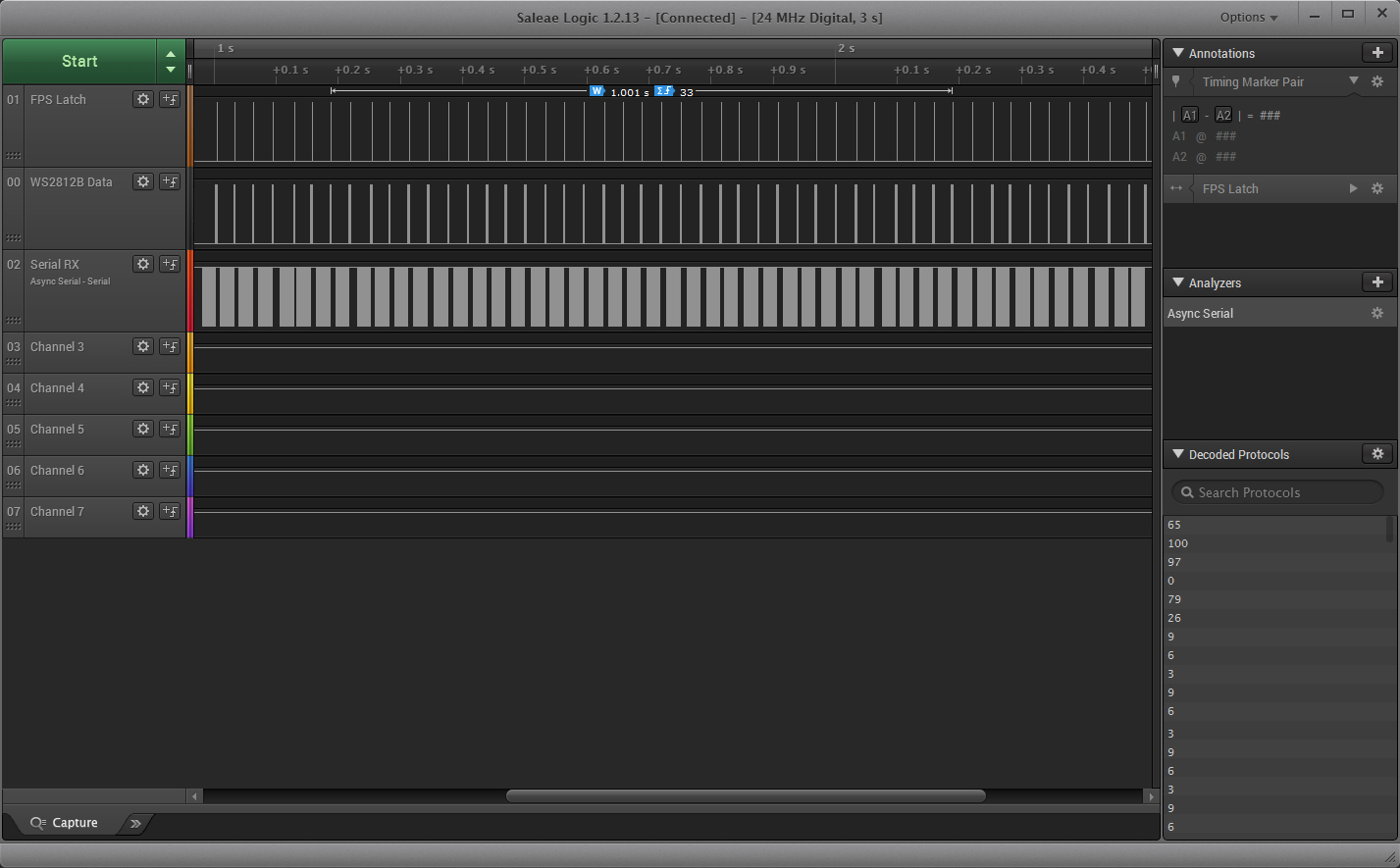
Aside from the relatively straight-forward color data, each Adalight frame is preceded by a small six-byte header. Since this header data is mixed in with a lot of RGB color data, I got to thinking… if this data was pushed to the LEDs, what would it look like?