
McCree Hammershot
Nerf Hammershot McCree Controller
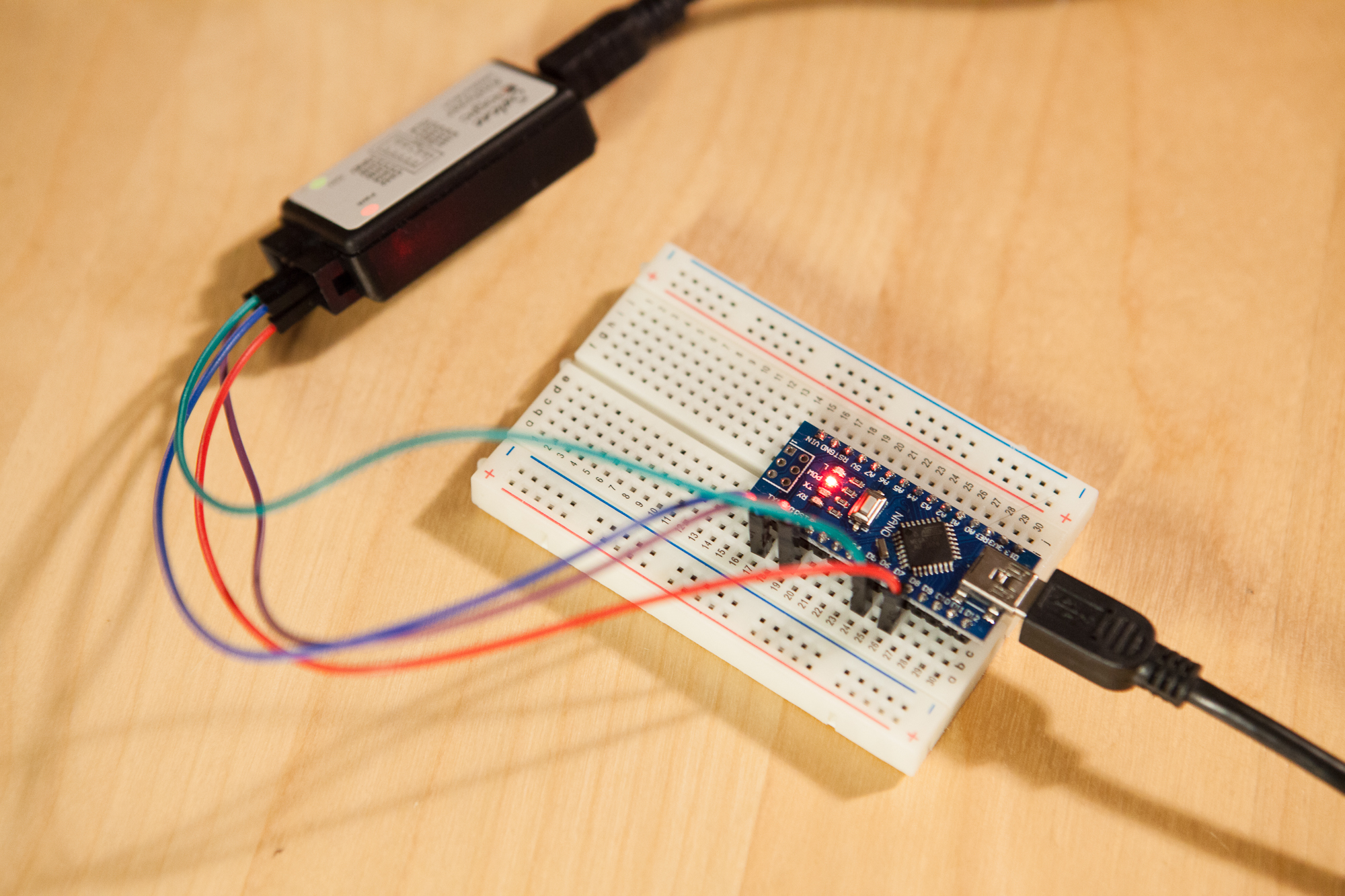
Using a Nerf Hammershot and an Arduino, I built my own custom video game controller for the character of McCree in Overwatch. Overview The Arduino inside of the Nerf gun acts as a mouse and keyboard, sending HID commands over USB to the computer. The trigger and hammer are wired to Read more